The determinant of a matrix is a scalar value that can be calculated for a square matrix (a matrix with the same number of rows and columns).
- It serves as a scaling factor that is used for the transformation of a matrix.
- It is a single numerical value that plays a key role in various matrix operations, such as calculating the inverse of a matrix or solving systems of linear equations.
- The determinant of a matrix A is denoted by ∣A∣ or sometimes as det(A).
Determinant of Matrix is defined as the sum of products of the elements of any row or column along with their corresponding co-factors.
There is a simple trick to find the determinant of a 3×3 matrix, which is given in the image below:
The determinant is defined only for square matrices of any order 2×2, 3×3, 4×4, or n×n, where n is the number of rows or the number of columns. (For a square matrix number of rows and columns is equal.)
These can be solved using standard formulas and shortcuts like Sarrus’ Rule (for 3×3).
- Sarrus’ Rule is a straightforward and visual method for calculating the determinant of a 3×3 matrix.
- It is only applicable to 3×3 matrices and provides a quick alternative to row or column expansion methods.
Subtract the sum of the upward diagonal products from the sum of the downward diagonal products:
det(A) = rvz + swx + tuy − rwy − suz − tvx
Example: Find the Determinant of the matrix using Sarrus' Rule only.
Matrix A = \begin{bmatrix} 1 & 2 & 3\\ 4 & 5 & 6 \\ 7 & 8 & 9 \end{bmatrix}
Upon applying Sarru's Rule:
\begin{bmatrix} + & + & + & - & - & - \\ 1 & 2 & 3 & 1 & 2 & 3\\ 4 & 5 & 6 & 4 & 5 & 6\\ 7 & 8 & 9 & 7 & 8 & 9 \\ \end{bmatrix}
= (1×5×9) + (2×6×7 )+ (3×4×8) - (1×6×8) - 2×4×9 - 3×5×7
= 45 + 84 + 96 - 48 - 72 - 105
= 225 - 225
= 0
This method is specifically for 3×3 matrices and provides a quick way to find the determinant.
In this article, we will cover the key concepts necessary to calculate the determinant of a matrix. We will also explore the use of a determinant calculator and learn proper techniques for calculating the determinants of 2×2, 3×3, and 4×4 matrices, as well as those of various other types of matrices.
Symbol of Determinant
Let’s take any square matrix A, then the determinant of A is denoted as:
det A (or) |A|.
It is also denoted by the symbol Δ.
Key elements to find the Determinant
Here are some elements that we need to know in order to calculate the determinant of a Matrix: Minor and Cofactors.
Minor
Minor is required to find the determinant for single elements (every element) of the matrix. They are the determinants for every element obtained by eliminating the rows and columns of that element. If the matrix given is:
\begin{bmatrix}a_{11} & a_{12} &a_{13}\\a_{21} & a_{22} & a_{23}\\a_{31} & a_{32} & a_{33}\end{bmatrix}
Minor of a12 will be the determinant:
\begin{vmatrix}a_{21} & a_{23}\\a_{31} & a_{33}\end{vmatrix}
Question: Find the Minor of element 5 in the determinant \begin{vmatrix}2 & 1 & 2\\4 & 5 & 0\\2 & 0 & 1\end{vmatrix}
Answer:
The minor of element 5 will be the determinant of \begin{vmatrix}2 & 2\\2 & 1\end{vmatrix}
Calculating the determinant, the minor is obtained as:
(2 × 1) - (2 × 2) = -2
Cofactors
Cofactors are related to minors by a small formula for an element aij, the cofactor of this element is Cin, and the minor is Mij; then, the cofactor can be written as:
C ij = (-1) i+j M ij
Example: Find the cofactor of the element placed in the first row and second column of the determinant:
\begin{vmatrix}2 & 1 & 2\\4 & 5 & 0\\2 & 0 & 1\end{vmatrix}
Answer:
In order to find out the cofactor of the first row and second column element i.e the cofactor for 1. First find out the minor for 1, which will be:
\begin{vmatrix}4 & 0\\2 & 1\end{vmatrix} \\ = (4 \times 1) - (2 \times 0) \\ = 4
M12 = 4
Now, applying the formula for cofactor:
C12 = (-1)1 + 2 M12
C12 = (-1)3 × 4
C12 = -4
Determinant of Matrix Calculator
A Determinant of Matrix calculator is a tool used to compute the determinant of a matrix quickly and accurately.
Determinant of a 1×1 Matrix
Let X = [a] be the matrix of order one, then its determinant is given by det(X) = a.
Determinant of a 2×2 Matrix
The determinant of any 2×2 square matrix A = \begin{bmatrix}a & b\\c & d\end{bmatrix}_{2\times2} is calculated using the formula |A| = ad - bc.
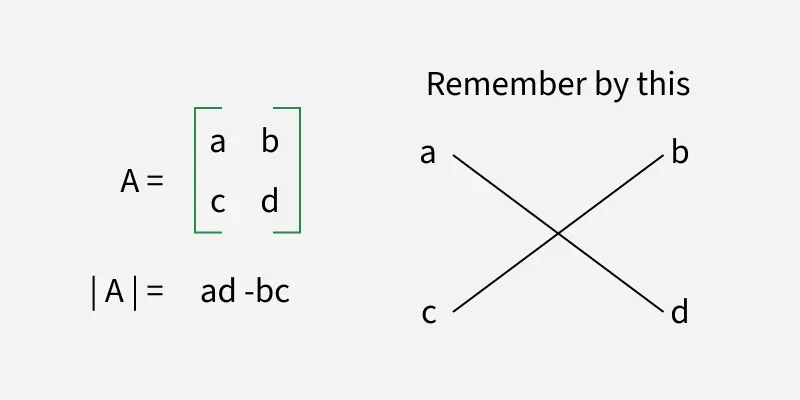 Determinant of 2×2 Matrix with the trick to remember it
Determinant of 2×2 Matrix with the trick to remember it
Example: Find the Determinant of A = \begin{bmatrix}3 & 2\\2 & 3\end{bmatrix}.
Solution:
Determinant of A = \begin{bmatrix}3 & 2\\2 & 3\end{bmatrix}_{2\times2} is calculated as,
| A | = \begin{vmatrix}3 & 2\\2 & 3\end{vmatrix}
| A | = 3 × 3 - 2 × 2
= 9 - 4
= 5
Determinant of a 3×3 Matrix
The determinant of a 3x3 Matrix is determined by expressing it in terms of 2nd-order determinants. It can be expanded either along rows(R1, R2 or R3) or column(C1 , C2 or C3).
Consider a matrix A of order 3×3.
 Determinant of 3×3 Matrix
Determinant of 3×3 Matrix
Similarly, in this way, we can expand it along any row and any column.
Example: Evaluate the determinant det(A) = \begin{vmatrix} 1 & 3 & 0 \\ 4 & 1 & 0 \\ 2 & 0 & 1 \end{vmatrix}
Solution:
We see that the third column has most number of zeros, so it will be easier to expand along that column.
det(A) = (-1)^{1 + 3}0\begin{vmatrix}4 & 1 \\ 2 & 0 \end{vmatrix} + (-1)^{2 + 3}0\begin{vmatrix}1 & 3 \\ 2 & 0 \end{vmatrix} + (-1)^{1 + 3}1\begin{vmatrix}1 & 3 \\ 4 & 1 \end{vmatrix} \\ = -11
Determinant of a 4×4 Matrix
Determining the determinant of a 4 × 4 matrix involves more complex methods, such as expansion by minors or Gaussian elimination. These techniques require breaking down the matrix into smaller submatrices and recursively finding their determinants. While there isn't a direct formula like Sarrus' Rule for 3x3 matrices, the process involves systematic calculations based on the properties of determinants.
 Determinant of a 4 × 4 Matrix with cofactor method
Determinant of a 4 × 4 Matrix with cofactor method [A] = a_{11}\begin{vmatrix}a_{22} & a_{23} &a_{24} &\\ a_{32} & a_{33} & a_{34}\\ a_{42} & a_{43} & a_{44} \end{vmatrix} - a_{12}\begin{vmatrix}a_{21} & a_{23} &a_{24} &\\ a_{31} & a_{33} & a_{34}\\ a_{41} & a_{43} & a_{44} \end{vmatrix} + a_{13}\begin{vmatrix}a_{21} & a_{22} &a_{24} &\\ a_{31} & a_{32} & a_{34}\\ a_{41} & a_{42} & a_{44} \end{vmatrix} - a_{14}\begin{vmatrix}a_{21} & a_{22} &a_{23} &\\ a_{31} & a_{32} & a_{33}\\ a_{41} & a_{42} & a_{43} \end{vmatrix}
Determinant of Identity Matrix
An identity matrix is a square matrix in which all the elements of the main diagonal are ones, and all other elements are zeros. For example, a 3x3 identity matrix looks like this:
I = \begin{vmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{vmatrix}
Given below is the determinant of an identity matrix:
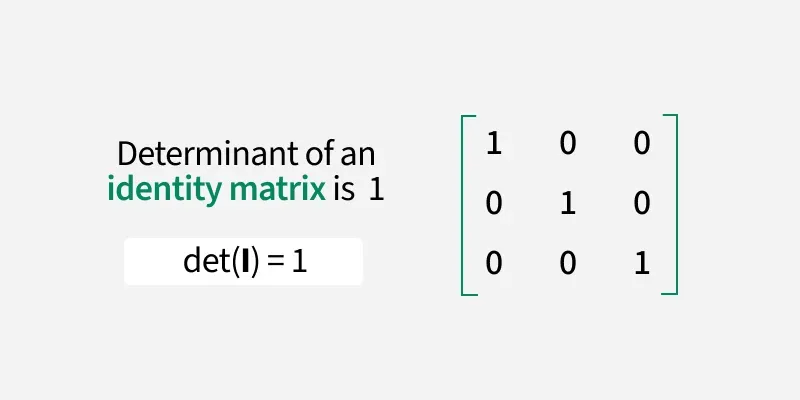 Determinant of an Identity Matrix of size 3×3
Determinant of an Identity Matrix of size 3×3
The determinant of an identity matrix of any size is always 1. This property can be understood intuitively by considering that the identity matrix represents a transformation that leaves vectors unchanged when multiplied by it. Since the determinant measures how a matrix scales the space, the determinant of an identity matrix, which doesn't scale the space at all, is 1.
Mathematically, we can express this as:
det (𝜤) = 1
Determinant of a Symmetric Matrix
A symmetric matrix is a square matrix that is equal to its transpose. In other words, if A is a symmetric matrix, then A = A T .
Symmetric matrices have several interesting properties, one of which is that their determinants remain unchanged under transpose.
Given below is the determinant of a Symmetric matrix:
 Determinant of an Symmetric Matrix of size 3×3
Determinant of an Symmetric Matrix of size 3×3
Hence, for a symmetric matrix A , we have:
det(A) = det( A T )
This property simplifies the computation of determinants for symmetric matrices since you can work with either the original matrix or its transpose, whichever is more convenient.
Determinant of Skew-Symmetric Matrix
A skew-symmetric (or antisymmetric) matrix is a square matrix whose transpose is equal to its negative. In other words, if A is a skew-symmetric matrix, then A = −AT . Skew-symmetric matrices have interesting properties, one of which is that their determinants have specific values based on the order of the matrix.
Given below is the determinant of a Skew-Symmetric matrix:
 Determinant of an Skew-Symmetric Matrix of size 3×3
Determinant of an Skew-Symmetric Matrix of size 3×3
For skew-symmetric matrices of odd order, the determinant is always 0. This is because the determinant of a skew-symmetric matrix is always the square of its eigenvalues, and a non-zero square is always positive. Since the order of the matrix is odd, at least one eigenvalue must be zero, resulting in a determinant of 0.
For skew-symmetric matrices of even order, the determinant is a non-zero value, which can be calculated based on the elements of the matrix. However, determining the exact value typically involves more complex methods such as cofactor expansion or using properties of determinants.
Determinant of Inverse Matrix
To understand the determinant of the inverse matrix, let's first define w as the inverse of a matrix
The inverse of a square matrix A, denoted as A−1, is a matrix such that when it's multiplied by A, the result is the identity matrix I. Mathematically, if A⋅A−1 = I, then A−1is the inverse of A.
Given below is the determinant of an Inverse matrix:
 Determinant of Inverse Matrix size 2×2
Determinant of Inverse Matrix size 2×2
Now, the determinant of the inverse matrix, denoted as det(A−1), is related to the determinant of the original matrix A. Specifically, it can be expressed by the formula:
det(A −1) = 1/det(A)
This formula illustrates an important relationship between the determinants of a matrix and its inverse. If the determinant of A is non-zero, meaning det(A) ≠ 0 , then the inverse matrix exists, and its determinant is the reciprocal of the determinant of A . Conversely, (A) = 0an , the matrix A is said to be singular, and it does not have an inverse.
Here are some key points about the determinant of the inverse matrix:
- Non-Singular Matrices: For non-singular matrices (those with non-zero determinants), their inverses exist, and the determinant of the inverse is the reciprocal of the determinant of the original matrix.
- Singular Matrices: Singular matrices (those with zero determinants) do not have inverses. Attempting to find the inverse of a singular matrix results in an undefined or non-existent inverse.
- Geometric Interpretation: The Determinant of the Matrix measures how it scales the space. Similarly, the determinant of the inverse matrix measures the scaling effect of the inverse transformation. If the original transformation expands the space, its inverse contraction will be inversely proportional, and vice versa.
Determinant of an Orthogonal Matrix
An orthogonal matrix is a square matrix whose rows and columns are orthonormal vectors, meaning that the dot product of any two distinct rows or columns equals zero, and the dot product of each row or column with itself equals one. Mathematically, if A is an orthogonal matrix , then A T ⋅ A = I , where A T denotes the transpose of A and I represents the identity matrix.
Given below is the determinant of an Orthogonal matrix:
 Determinant of Orthogonal Matrix size 2×2
Determinant of Orthogonal Matrix size 2×2
The determinant of an orthogonal matrix has a special property:
det ( A ) = ±1
The determinant of an orthogonal matrix is either +1+1 or −1−1. This property arises from the fact that the determinant represents the scaling factor of the matrix transformation. Since orthogonal transformations preserve lengths, the determinant must be either positive (for preserving orientation) or negative (for reversing orientation).
The determinant of an orthogonal matrix being +1+1 implies that the transformation preserves orientation, while a determinant of −1 indicates a transformation that reverses orientation.
Determinant of a Triangular Matrix
A triangular matrix is a special type of square matrix in which all the elements above or below the main diagonal are zero.
Given below is the determinant of Triangular matrices:
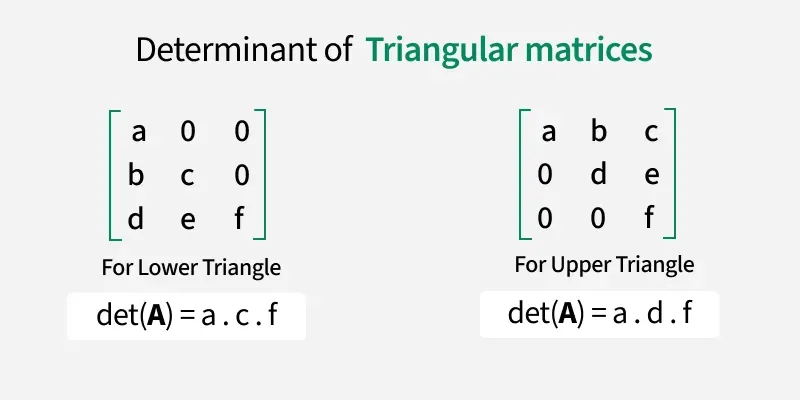 Dterminant of Triangular Matrices for uper and lower triangle matrices
Dterminant of Triangular Matrices for uper and lower triangle matrices
There are two main types:
- Lower Triangular Matrix:
A square matrix in which all elements above the main diagonal are zero.
Example: \begin{bmatrix}
a_{11} & 0 & 0 \\
a_{21} & a_{22} & 0 \\
a_{31} & a_{32} & a_{33}
\end{bmatrix}
- Upper Triangular Matrix:
A square matrix in which all elements below the main diagonal are zero.
Example: \begin{bmatrix}
a_{11} & a_{12} & a_{13} \\
0 & a_{22} & a_{23} \\
0 & 0 & a_{33}
\end{bmatrix}
Physical Significance of Determinant
Consider a 2D matrix, each column of this matrix can be considered as a vector on the x-y plane. So, the determinant between two vectors on a 2d plane gives us the area enclosed between them. If we extend this concept, in 3D the determinant will give us the volume enclosed between two vectors.
 Area enclosed between two vectors in 2D
Area enclosed between two vectors in 2DLaplace’s formula is used to express the Determinant of a Matrix in terms of the minors of the matrix.
If An×n is the given square matrix and Cij is the cofactor of Aij the solution for any row i or column j
det (A) = \sum_{i =1}^{n}A_{ij}C_{ij}
Properties of Determinants of a Matrix
Various Properties of the Determinants of the square matrix are discussed below:
- Reflection Property: Value of the determinant remains unchanged even after rows and columns are interchanged. The Determinant of a Matrix and its transpose remains the same.
- Switching Property: If any two rows or columns of a determinant are interchanged, then the sign of the determinant changes.
- Scalar Multiplication Property: If each element in a row or column of a matrix A is multiplied by a scalar k, then the determinant of the resulting matrix is k times the determinant of A . Mathematically, if B is the matrix obtained by multiplying each element of a row or column of A by detk, then det (B) = k ⋅ det(A).
- Additivity Property: The determinant of the sum of two matrices A and B is equal to the sum of their determinants. Symbolically, det(A + B ) = det(A) + det(B) . However, this property applies only if the matrices have the same dimensions.
- Multiplicative Property: The determinant of the product of two matrices A and B is equal to the product of their determinants.
Symbolically, det(AB) = det(A )⋅det( B ). However, this property holds true only for square matrices.
- Determinant of Transpose: The Determinant of Matrix A is equal to the determinant of its transpose A T Mathematically, det( A ) = det( A T ) .
Example: \begin{vmatrix} 3 & 3 & 0 \\ 2 & 1 & 1 \\ 5 & 0 & 1 \end{vmatrix}
Solution:
det. A = [3 × {(1 × 1) - (0 × 1)}] - [3 × {(2 × 1) - (5 × 1)}] + [0 × {(2 × 0) - (5 × 1)}]
= {3 × (1 - 0)} - {3 × (2 - 5) + 0
= [3 - {3(-3)} + 0]
= (3 + 9)
=12
Now, Interchanging Row 1 with Row 2, determinant will be:
\begin{vmatrix} 2 & 1 & 1 \\ 3 & 3 & 0 \\ 5 & 0 & 1 \end{vmatrix}
det. A = [2 × {(3 × 1) - (0 × 0)}] - [1 × {(3 × 1) - (5 × 0)}] + [1 × {(3 × 0) - (5 × 3)}]
= (6 - 3 - 15)
= -12
- Repetition Property/Proportionality Property: If any two rows or any two columns of a determinant are identical, then the value of the determinant becomes zero.
- Scalar Multiple Property: If each element of a row (or a column) of a determinant is multiplied by a constant k, then its value gets multiplied by k
\begin{vmatrix} ka & kb \\ c & d \end{vmatrix} = k\begin{vmatrix} a & b \\ c & d \end{vmatrix}
- Sum Property If some or all elements of a row or column can be expressed as the sum of two or more terms, then the determinant can also be expressed as the sum of two or more determinants.
\begin{vmatrix} a_{1} + \lambda_{1} & a_{2} + \lambda_{2} & a_{3} + \lambda_{3} \\ b_{1} & b_{2} & b_{3} \\ c_{1} & c_{2} & c_{3} \end{vmatrix} = \begin{vmatrix} a_{1} & a_{2} & a_{3} \\ b_{1} & b_{2} & b_{3} \\ c_{1} & c_{2} & c_{3} \end{vmatrix} + \begin{vmatrix} \lambda_{1} & \lambda_{2} & \lambda_{3} \\ b_{1} & b_{2} & b_{3} \\ c_{1} & c_{2} & c_{3} \end{vmatrix}
Solved Question on Determinant of Matrix
Question 1: If x, y, and z are different. and A = \begin{vmatrix} x & x^{2} & 1 + x^{3} \\ y & y^{2} & 1 + y^{3} \\ z & z^{2} & 1 + z^{3} \end{vmatrix} = 0 , then show that 1 + xyz = 0.
Solution:
Using Sum Property
\begin{vmatrix} x & x^{2} & 1 + x^{3} \\ y & y^{2} & 1 + y^{3} \\ z & z^{2} & 1 + z^{3} \end{vmatrix} = \begin{vmatrix} x & x^{2} & 1 \\ y & y^{2} & 1\\ z & z^{2} & 1 \end{vmatrix} + \begin{vmatrix} x & x^{2} & x^{3} \\ y & y^{2} & y^{3} \\ z & z^{2} & z^{3} \end{vmatrix} \text{} \\ = (-1)^{2}\begin{vmatrix} 1 & x & x^{2} \\ 1 & y & y^{2}\\ 1 & z & z^{2} \end{vmatrix} + xyz\begin{vmatrix} 1 & x & x^{2} \\ 1 & y & y^{2}\\ 1 & z & z^{2} \end{vmatrix} \\ = (1 + xyz) \begin{vmatrix} 1 & x & x^{2} \\ 1 & y & y^{2}\\ 1 & z & z^{2} \end{vmatrix} = 0
On solving this determinant and expanding it,
A = (1 + xyz)(y- x)(z-y)(z-x)
Since it's given in the question, that all x, y and z have different values and A =0. So the only term that can be zero is 1 + xyz.
Hence, 1 + xyz = 0
Question 2: Evaluate the \begin{vmatrix} 102 & 18 & 36 \\ 1 & 3 & 4 \\ 17 & 3 & 6 \\ \end{vmatrix} .
Solution:
Using Scalar Multiple Property and Repetition Property
\begin{vmatrix} 102 & 18 & 36 \\ 1 & 3 & 4 \\ 17 & 3 & 6 \\ \end{vmatrix} = \begin{vmatrix} 17(6) & 6(3) & 6(6) \\ 1 & 3 & 4 \\ 17 & 3 & 6 \\ \end{vmatrix} \\ = 6\begin{vmatrix} 17 & 3 & 6 \\ 1 & 3 & 4 \\ 17 & 3 & 6 \\ \end{vmatrix} = 0 \text{}
Question 3: Evaluate the determinant A = \begin{vmatrix} 2 & 3 & 1 \\ 1 & 0 & 5 \\ 2 & 3 & 1 \end{vmatrix} \\
Solution:
Using Proportionality Property
Two of the rows of the matrix are identical.
So, A = \begin{vmatrix} 2 & 3 & 1 \\ 1 & 0 & 5 \\ 2 & 3 & 1 \end{vmatrix} \\ = 0 \text{}
Question 4: Given Matrix:A = \begin{bmatrix}3 & 5 & 2 \\0 & 4 & 1 \\0 & 0 & 6\end{bmatrix}.
Solution:
Given the matrix:
A = \begin{bmatrix}3 & 5 & 2 \\0 & 4 & 1 \\0 & 0 & 6\end{bmatrix}
Identify the Diagonal Elements
a11 = 3, a22 = 4, a33 = 6
Apply the Determinant Formula for Triangular Matrices
det(A) = a11 × a22 × a33
det(A) = 3× 4 × 6 = 72
Determinant of Matrix Practice Problems
Question 1: Calculate the determinant of the following matrix:
A = \begin{pmatrix} 3 & 5 \\ 2 & 4 \end {pmatrix}
Question 2: Find the determinant of the matrix:
B = \begin{pmatrix} 1 & 2 & 3 \\ 0 & 1 & 4 \\ 5 & 6 & 0 \end{pmatrix}
Question 3: Determine the determinant of the matrix:
C = \begin{pmatrix} -1 & 2 \\ 3 & -4 \end{pmatrix}
Question 4: Calculate the determinant of the following matrix:
D = \begin{pmatrix} 0 & 2 & 0 \\ 1 & 0 & 3 \\ 0 & 5 & 1 \end{pmatrix}
Determinant of a Matrix- Formula, Properties, Examples, and FAQs
Similar Reads
Maths Mathematics, often referred to as "math" for short. It is the study of numbers, quantities, shapes, structures, patterns, and relationships. It is a fundamental subject that explores the logical reasoning and systematic approach to solving problems. Mathematics is used extensively in various fields
5 min read
Basic Arithmetic
What are Numbers?Numbers are symbols we use to count, measure, and describe things. They are everywhere in our daily lives and help us understand and organize the world.Numbers are like tools that help us:Count how many things there are (e.g., 1 apple, 3 pencils).Measure things (e.g., 5 meters, 10 kilograms).Show or
15+ min read
Arithmetic OperationsArithmetic Operations are the basic mathematical operations—Addition, Subtraction, Multiplication, and Division—used for calculations. These operations form the foundation of mathematics and are essential in daily life, such as sharing items, calculating bills, solving time and work problems, and in
9 min read
Fractions - Definition, Types and ExamplesFractions are numerical expressions used to represent parts of a whole or ratios between quantities. They consist of a numerator (the top number), indicating how many parts are considered, and a denominator (the bottom number), showing the total number of equal parts the whole is divided into. For E
7 min read
What are Decimals?Decimals are numbers that use a decimal point to separate the whole number part from the fractional part. This system helps represent values between whole numbers, making it easier to express and measure smaller quantities. Each digit after the decimal point represents a specific place value, like t
10 min read
ExponentsExponents are a way to show that a number (base) is multiplied by itself many times. It's written as a small number (called the exponent) to the top right of the base number.Think of exponents as a shortcut for repeated multiplication:23 means 2 x 2 x 2 = 8 52 means 5 x 5 = 25So instead of writing t
9 min read
PercentageIn mathematics, a percentage is a figure or ratio that signifies a fraction out of 100, i.e., A fraction whose denominator is 100 is called a Percent. In all the fractions where the denominator is 100, we can remove the denominator and put the % sign.For example, the fraction 23/100 can be written a
5 min read
Algebra
Variable in MathsA variable is like a placeholder or a box that can hold different values. In math, it's often represented by a letter, like x or y. The value of a variable can change depending on the situation. For example, if you have the equation y = 2x + 3, the value of y depends on the value of x. So, if you ch
5 min read
Polynomials| Degree | Types | Properties and ExamplesPolynomials are mathematical expressions made up of variables (often represented by letters like x, y, etc.), constants (like numbers), and exponents (which are non-negative integers). These expressions are combined using addition, subtraction, and multiplication operations.A polynomial can have one
9 min read
CoefficientA coefficient is a number that multiplies a variable in a mathematical expression. It tells you how much of that variable you have. For example, in the term 5x, the coefficient is 5 — it means 5 times the variable x.Coefficients can be positive, negative, or zero. Algebraic EquationA coefficient is
8 min read
Algebraic IdentitiesAlgebraic Identities are fundamental equations in algebra where the left-hand side of the equation is always equal to the right-hand side, regardless of the values of the variables involved. These identities play a crucial role in simplifying algebraic computations and are essential for solving vari
14 min read
Properties of Algebraic OperationsAlgebraic operations are mathematical processes that involve the manipulation of numbers, variables, and symbols to produce new results or expressions. The basic algebraic operations are:Addition ( + ): The process of combining two or more numbers to get a sum. For example, 3 + 5 = 8.Subtraction (−)
3 min read
Geometry
Lines and AnglesLines and Angles are the basic terms used in geometry. They provide a base for understanding all the concepts of geometry. We define a line as a 1-D figure that can be extended to infinity in opposite directions, whereas an angle is defined as the opening created by joining two or more lines. An ang
9 min read
Geometric Shapes in MathsGeometric shapes are mathematical figures that represent the forms of objects in the real world. These shapes have defined boundaries, angles, and surfaces, and are fundamental to understanding geometry. Geometric shapes can be categorized into two main types based on their dimensions:2D Shapes (Two
2 min read
Area and Perimeter of Shapes | Formula and ExamplesArea and Perimeter are the two fundamental properties related to 2-dimensional shapes. Defining the size of the shape and the length of its boundary. By learning about the areas of 2D shapes, we can easily determine the surface areas of 3D bodies and the perimeter helps us to calculate the length of
10 min read
Surface Areas and VolumesSurface Area and Volume are two fundamental properties of a three-dimensional (3D) shape that help us understand and measure the space they occupy and their outer surfaces.Knowing how to determine surface area and volumes can be incredibly practical and handy in cases where you want to calculate the
10 min read
Points, Lines and PlanesPoints, Lines, and Planes are basic terms used in Geometry that have a specific meaning and are used to define the basis of geometry. We define a point as a location in 3-D or 2-D space that is represented using coordinates. We define a line as a geometrical figure that is extended in both direction
14 min read
Coordinate Axes and Coordinate Planes in 3D spaceIn a plane, we know that we need two mutually perpendicular lines to locate the position of a point. These lines are called coordinate axes of the plane and the plane is usually called the Cartesian plane. But in real life, we do not have such a plane. In real life, we need some extra information su
6 min read
Trigonometry & Vector Algebra
Trigonometric RatiosThere are three sides of a triangle Hypotenuse, Adjacent, and Opposite. The ratios between these sides based on the angle between them is called Trigonometric Ratio. The six trigonometric ratios are: sine (sin), cosine (cos), tangent (tan), cotangent (cot), cosecant (cosec), and secant (sec).As give
4 min read
Trigonometric Equations | Definition, Examples & How to SolveTrigonometric equations are mathematical expressions that involve trigonometric functions (such as sine, cosine, tangent, etc.) and are set equal to a value. The goal is to find the values of the variable (usually an angle) that satisfy the equation.For example, a simple trigonometric equation might
9 min read
Trigonometric IdentitiesTrigonometric identities play an important role in simplifying expressions and solving equations involving trigonometric functions. These identities, which include relationships between angles and sides of triangles, are widely used in fields like geometry, engineering, and physics. Some important t
10 min read
Trigonometric FunctionsTrigonometric Functions, often simply called trig functions, are mathematical functions that relate the angles of a right triangle to the ratios of the lengths of its sides.Trigonometric functions are the basic functions used in trigonometry and they are used for solving various types of problems in
6 min read
Inverse Trigonometric Functions | Definition, Formula, Types and Examples Inverse trigonometric functions are the inverse functions of basic trigonometric functions. In mathematics, inverse trigonometric functions are also known as arcus functions or anti-trigonometric functions. The inverse trigonometric functions are the inverse functions of basic trigonometric function
11 min read
Inverse Trigonometric IdentitiesInverse trigonometric functions are also known as arcus functions or anti-trigonometric functions. These functions are the inverse functions of basic trigonometric functions, i.e., sine, cosine, tangent, cosecant, secant, and cotangent. It is used to find the angles with any trigonometric ratio. Inv
9 min read
Calculus
Introduction to Differential CalculusDifferential calculus is a branch of calculus that deals with the study of rates of change of functions and the behaviour of these functions in response to infinitesimal changes in their independent variables.Some of the prerequisites for Differential Calculus include:Independent and Dependent Varia
6 min read
Limits in CalculusIn mathematics, a limit is a fundamental concept that describes the behaviour of a function or sequence as its input approaches a particular value. Limits are used in calculus to define derivatives, continuity, and integrals, and they are defined as the approaching value of the function with the inp
12 min read
Continuity of FunctionsContinuity of functions is an important unit of Calculus as it forms the base and it helps us further to prove whether a function is differentiable or not. A continuous function is a function which when drawn on a paper does not have a break. The continuity can also be proved using the concept of li
13 min read
DifferentiationDifferentiation in mathematics refers to the process of finding the derivative of a function, which involves determining the rate of change of a function with respect to its variables.In simple terms, it is a way of finding how things change. Imagine you're driving a car and looking at how your spee
2 min read
Differentiability of a Function | Class 12 MathsContinuity or continuous which means, "a function is continuous at its domain if its graph is a curve without breaks or jumps". A function is continuous at a point in its domain if its graph does not have breaks or jumps in the immediate neighborhood of the point. Continuity at a Point: A function f
11 min read
IntegrationIntegration, in simple terms, is a way to add up small pieces to find the total of something, especially when those pieces are changing or not uniform.Imagine you have a car driving along a road, and its speed changes over time. At some moments, it's going faster; at other moments, it's slower. If y
3 min read
Probability and Statistics
Basic Concepts of ProbabilityProbability is defined as the likelihood of the occurrence of any event. It is expressed as a number between 0 and 1, where 0 is the probability of an impossible event and 1 is the probability of a sure event.Concepts of Probability are used in various real life scenarios : Stock Market : Investors
7 min read
Bayes' TheoremBayes' Theorem is a mathematical formula used to determine the conditional probability of an event based on prior knowledge and new evidence. It adjusts probabilities when new information comes in and helps make better decisions in uncertain situations.Bayes' Theorem helps us update probabilities ba
13 min read
Probability Distribution - Function, Formula, TableA probability distribution is a mathematical function or rule that describes how the probabilities of different outcomes are assigned to the possible values of a random variable. It provides a way of modeling the likelihood of each outcome in a random experiment.While a Frequency Distribution shows
13 min read
Descriptive StatisticStatistics is the foundation of data science. Descriptive statistics are simple tools that help us understand and summarize data. They show the basic features of a dataset, like the average, highest and lowest values and how spread out the numbers are. It's the first step in making sense of informat
5 min read
What is Inferential Statistics?Inferential statistics is an important tool that allows us to make predictions and conclusions about a population based on sample data. Unlike descriptive statistics, which only summarize data, inferential statistics let us test hypotheses, make estimates, and measure the uncertainty about our predi
7 min read
Measures of Central Tendency in StatisticsCentral tendencies in statistics are numerical values that represent the middle or typical value of a dataset. Also known as averages, they provide a summary of the entire data, making it easier to understand the overall pattern or behavior. These values are useful because they capture the essence o
11 min read
Set TheorySet theory is a branch of mathematics that deals with collections of objects, called sets. A set is simply a collection of distinct elements, such as numbers, letters, or even everyday objects, that share a common property or rule.Example of SetsSome examples of sets include:A set of fruits: {apple,
3 min read
Practice