Treghetsnavigasjon er basert på fysiske lover som var forstått allerede på 1600-tallet, men det fikk ingen praktisk betydning før under andre verdenskrig, da de ble brukt i de tyske V2-rakettene fra 1944. Gradvis ble også systemene videreutviklet for også å kunne benyttes i ubåter i neddykket tilstand, og treghetsnavigasjon gjorde det mulig for atomubåten USS Nautilus å seile under nordpolisen i 1958. Nå er systemene også vanlig i sivil luftfart, og det er vanlig at større rutefly har tre uavhengige treghetssystemer, hvor det benyttes et vektet gjennomsnitt av de tre. I fly benyttes gjerne begrepet IRS (Inertial Reference System).
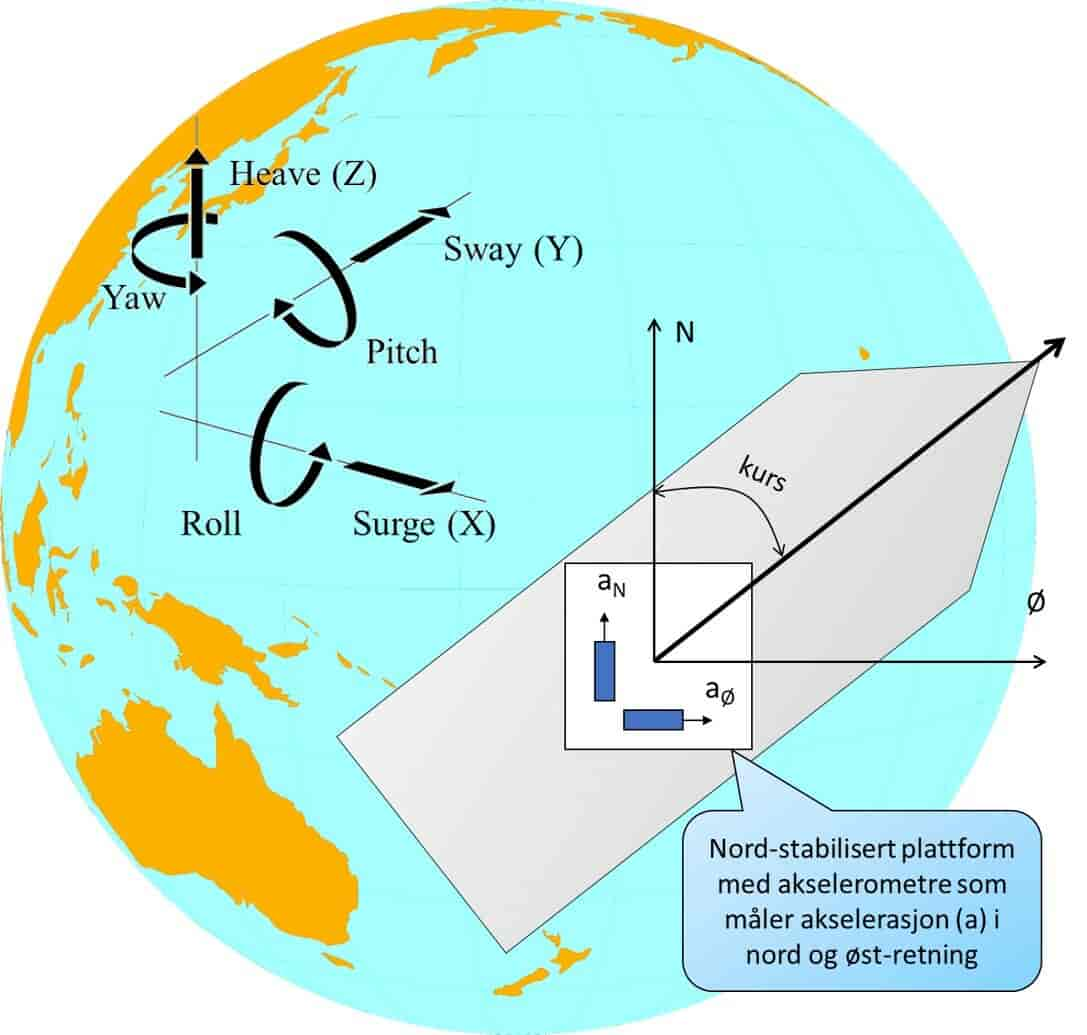
Det grunnleggende prinsippet er basert på akselerometre som måler hastighetsvariasjoner, som så kan brukes til beregning av hastighet og tilbakelagt distanse (dobbeltintegrasjon over tidsintervallet). Videre har man gyrosystemer som bidrar til å definere retningen til akselerasjonene, som da matematisk kan betraktes som vektorer. I treghetsnavigasjon vil det være vanlig å definere tre retninger; nord, øst og vertikalt. Dermed kan man navigere etter tilnærmet samme metode som bestikkregning på skip i tre dimensjoner, da forutsatt at utgangsposisjon er kjent. Systemet vil så fortløpende beregne breddegrad, lengdegrad og høyde/dybde. Innen romfart vil andre former for koordinatsystemer kunne benyttes.
Siden systemet ikke har behov for ytre signaler, vil treghetsnavigasjon være svært robust, og ikke sårbare for jamming og lignende. Treghetsnavigasjon har derfor blitt et viktig og vanlig system for forskjellige militære anvendelser, og ofte brukes den engelske forkortelsen INS (Inertial Navigation System).




Kommentarer (2)
skrev Lars Mæhlum
svarte Børje Forssell
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.