
基于 ZYNQ 的 88E1111 的 RGMII to SGMII
+ BCM5396 的网络通讯功能 (含 uboot 与
kernel 的修改)
LSL 2022.03.29
ZYNQ 的 PS 端内部提供 GMII 和 RGMII 两种接口连接外部 PHY 芯片实现
网络通讯功能,ZYNQ 的 PS 端的网络硬件示意图如下图所示。
ZYNQ(PS) PHY(88E1111)
Magic
(变压器)
RJ45接口
RGMII MDI GE
图 1 ZYNQ 的 PS 端传统网络硬件示意图
以上网络功能的实现,在 xilinx 官方 uboot 和 kernel 内核中已经实现,在 uboot
和 kernel 中设备树的描述中这种方式配置为 rgmii-id 或 rgmii 模式。其中 PHY 芯
片(88E1111)工作在 RGMII to Copper 的模式,关于 uboot 和 kernel 内核中模式
的配置,具体参考源代码进行理解。
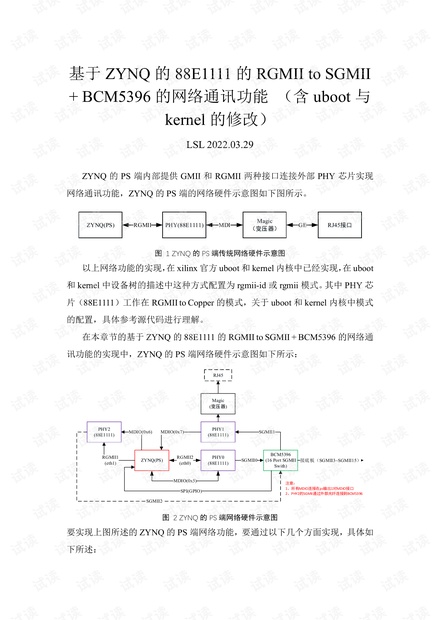
在本章节的基于 ZYNQ 的 88E1111 的 RGMII to SGMII + BCM5396 的网络通
讯功能的实现中,ZYNQ 的 PS 端网络硬件示意图如下所示:
ZYNQ(PS)
PHY0
(88E1111)
RGMII2
(eth0)
MDIO(0x5)
BCM5396
(16 Port SGMII
Swith)
SGMII0
PHY1
(88E1111)
SGMII1
Magic
(变压器)
RJ45
PHY2
(88E1111)
RGMII1
(eth1)
SGMII2
MDIO(0x6) MDIO(0x7)
SPI(GPIO)
接底板(SGMII3~SGMII15)
注意:
1、所有MDIO连接在ps输出1对MDIO接口
2、PHY2的SGMII通过外部光纤连接到BCM5396
图 2 ZYNQ 的 PS 端网络硬件示意图
要实现上图所述的 ZYNQ 的 PS 端网络功能,要通过以下几个方面实现,具体如
下所述:



剩余22页未读,继续阅读

少林and叔叔
- 粉丝: 7557









最新资源
- (源码)基于Python Tkinter GUI库的随机选择器.zip
- (源码)基于 PHP 的宝塔服务器状态监控系统.zip
- (源码)基于Arduino的BeeBot机器人控制系统.zip
- (源码)基于Atmel8266MCU的闹钟系统.zip
- 一个flask+jQuery的项目,实现文本相似度查询.作为Python必修课和Python选修课大作业
- (源码)基于Nodered和Arduino的气象站监测系统.zip
- (源码)基于Python和Flutter的智能家居自动化管理系统.zip
- (源码)基于Python的微信聊天机器人.zip
- 北上广成沈五城市PM2.5分析 中国农业大学大数据(二学位)Python程序设计课程作业
- 北京大学暑期学校:Python语言基础及应用(Python Programming and Application)小组作业
- 大三上,编译原理大作业,函数绘图语言解释器,Function Mapping Language Interpreter,Python实现
- Confluence实战指南:提升团队协作效能
- 南开大学《数据库原理》课程大作业,基于mysql和python实现的选课系统
- 多媒体大作业,一个基于 Electron-vue + Python 的图像转动画应用
- Python大作业,KTV点歌系统,支持歌曲增删改查,歌词显示
- 数据库的大作业 因为c++太麻烦了 所以使用Python实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论30