Dawn (sonde spatiale)
Pour les articles homonymes, voir Dawn.
Dawn (« aube » en anglais) est une sonde spatiale de la NASA dont la mission consiste à explorer la ceinture d'astéroïdes entre 2011 à 2015.
 |frameless |upright=1.3 |alt=Description de cette image, également commentée ci-après ]]
|frameless |upright=1.3 |alt=Description de cette image, également commentée ci-après ]]
| Organisation | NASA |
|---|---|
| Programme | Discovery |
| Domaine | Étude de la ceinture d'astéroïdes |
| Type de mission | Orbiteur |
| Lancement | 27 septembre 2007 |
| Lanceur | Delta II |
| Survol de | Mars |
| Insertion en orbite | août 2011 |
| Fin de mission | prévue pour 2015 |
| Identifiant COSPAR | 2007-043A |
| Site | http://dawn.jpl.nasa.gov/ |
| Masse au lancement | 1 237 kg |
|---|---|
| Propulsion | Ionique |
| Δv | 10 km/s |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 10 kW (1 UA) |
| Satellite de | (4) Vesta ; (1) Cérès |
|---|---|
| Orbite | Polaire |
| FC | Caméra |
|---|---|
| VIR | Spectro-imageur |
| GRaND | Spectromètre gamma et à neutron |
Après avoir échappée de peu à une annulation en 2006, Dawn est lancée le 27 septembre 2007. La sonde s'est mise en orbite autour de Vesta le 16 juillet 2011. Elle devrait la quitter en juillet 2012 pour aller se mettre en orbite autour Cérès qu'elle atteindra en février 2015. Cérès et Vesta sont deux plus grands corps de la ceinture d'astéroïdes. Il est prévu que la mission s'achève en juillet 2015.
Les deux objets qui doivent être explorés par Dawn sont des témoins des débuts de la formation du système solaire. La sonde, à l'aide de ses trois instruments scientifiques, doit photographier et cartographier Cérès et Vesta, analyser leur champ de gravité et effectuer des mesures spectrales de l'abondance et la distribution des roches de surface ainsi que des éléments chimiques significatifs. Les données recueillies permettront d'affiner les théories relatives au processus de formation des planètes.
Pour parvenir jusqu'à la ceinture d'astéroïdes, Dawn a réalisé deux orbites en décrivant une spirale autour du Soleil tout en faisant fonctionner durant 70% du temps sa propulsion ionique, caractérisée par une poussée très faible. Elle a également recours en février 2009 à l'assistance gravitationnelle de la planète Mars. Sur le plan technique Dawn, qui pèse environ 1 300 kg dont 425 kg d'ergols, devrait accélérer de plus de 10 km/s au cours de sa mission en utilisant ses moteurs ioniques établissant un nouveau record et démontrant le potentiel de ce type de propulsion pour les missions interplanétaires. C'est également la première fois qu'une sonde spatiale se placera successivement en orbite autour de deux corps célestes. Le cout de développement et de mise en œuvre de Dawn devrait être inférieur à 500 millions de dollars.
Contexte
La découverte de la ceinture d'astéroïdes
À la fin du 18e siècle siècle, les astronomes européens conjuguent leurs efforts pour trouver la planète qui, selon les théories de l'époque, devrait se trouver entre les orbites de Mars et Jupiter. En découvrant Cérès en 1801, ils pensent avoir identifié la planète manquante mais ils détectent au cours des années suivantes d'autres corps célestes dont l'orbite s'inscrit dans la même région de l'espace située entre 2 et 4 Unités Astronomiques du Soleil : (2) Pallas en 1802, Junon en 1804, Vesta en 1807. Vers 1830, les astronomes parviennent à estimer la taille de ces objets qui sont beaucoup plus petits que des planètes ; ils les rangent dans une nouvelle catégorie de corps célestes baptisés astéroïdes. Vers 1860, le nombre d'astéroïdes dépasse la centaine et le physicien Daniel Kirkwood met en évidence des lacunes dans la distribution de leurs orbites : il attribue ces irrégularités à l'influence gravitationnelle de Jupiter. Par la suite, les astéroïdes sont longtemps considérés comme les débris d'une ancienne planète avant que la théorie en vigueur aujourd'hui définisse un autre mode de formation[1].
La ceinture d'astéroïdes et la formation du système solaire

Depuis les premières découvertes, les astronomes ont pu déterminer à l'aide de télescopes spatiaux et terrestres que la ceinture d'astéroïdes regroupait des centaines de milliers d'astéroïdes. Le processus de formation communément admis est désormais le suivant. Au moment de la naissance du système solaire il y a 4,6 milliards d'années, cette région de l'espace contenait suffisamment de matière pour créer deux à trois planètes de la taille de la Terre ; en quelques dizaines de milliers d'années, comme dans le reste du système solaire, un grand nombre de planétésimaux se sont formés par accrétion de cette matière. Quelques protoplanètes sont apparues. Mais alors qu'ailleurs ces protoplanètes se sont elles-mêmes agrégées pour former les planètes, le processus a été stoppé dans la ceinture des astéroïdes environ 15 millions d'années après avoir débuté lorsque les planètes voisines plus massives se sont formées. Les résonances orbitales avec Jupiter et Saturne ainsi que les interactions gravitationnelles avec des embryons plus massifs ont chassé la majorité des planétésimaux vers d'autres orbites ou les ont fait éclater[2]. L'influence des planètes géantes et des protoplanètes n'ont laissé dans la ceinture d'astéroïdes qu'une masse totale équivalente à moins de 0,1 % de celle de la Terre, composée principalement de petits planétésimaux[3].
La ceinture d'astéroïdes peut être considérée comme une relique du système solaire primitif. Les astéroïdes qui subsistent ont peu évolué depuis l'époque de leur formation et contiennent de ce fait des informations précieuses sur les conditions et les processus à l'œuvre à ce moment clé de la formation des planètes.
Vesta et Cérès

Vesta et Cérès, qui sont les corps les plus massifs de la ceinture d'astéroïdes, ont été choisis comme objectifs de la mission de la sonde spatiale Dawn. Le troisième astéroïde par la masse, (2) Pallas, n'a pas été retenu par les concepteurs de la mission : son orbite est beaucoup plus couteuse à atteindre car elle s'écarte fortement du plan de l'écliptique. Il est peu probable que Dawn survole d'autres astéroïdes que Vesta et Cérès car dans l'éventualité où il subsisterait suffisamment de temps, les scientifiques préfèrent prolonger l'étude des deux astéroïdes[4]. Vesta et Cérès, après s'être formées au cours des 10 premiers millions d'années du processus d'accrétion, ont survécu à l'influence de Jupiter mais n'ont plus évolué par la suite, alors que l'accrétion s'est poursuivie durant 50 millions d'années pour la Terre[5].
D'après les observations effectuées à l'aide de télescopes, Vesta, dont le diamètre est d'environ 530 km, est un corps où l'eau semble absente et qui comporte des terrains différenciés dont une partie serait constituée de laves basaltiques. La protoplanète a suivi un processus de différenciation planétaire comme les planètes internes au cours duquel les éléments radioactifs à courte durée de vie ont fait fondre les roches en un magma à l'origine du noyau ferreux plus dense et du manteau magmatique périphérique plus léger. Un cratère d'impact de 460 km de diamètre près du pôle sud est le reflet d'une collision qui a expulsé près de 1% de sa masse. La gravité sur Vesta est environ 3% de celle de la Terre. Les météorites HED, qui sont sans doute des fragments de Vesta arrachés lors de collisions avec d'autres astéroïdes, ont fourni de nombreuses informations sur la structure de l'astéroïde : un des objectifs de la mission est tout à la fois de confirmer cette origine et de déterminer dans quelles conditions géologiques le matériau très particulier qui constitue ces météorites, s'est créé[6],[5].
Cérès est le plus grand corps de la ceinture d'astéroïdes avec un diamètre d'environ 950 km. Contrairement à Vesta, elle est classé dans la catégorie des planètes naines car elle possède une masse suffisante pour que sa gravité l'emporte sur les forces de cohésion du corps solide et le maintienne en équilibre hydrostatique ce qui lui donne une forme presque sphérique. Elle est très différente de Vesta. Les mesures effectuées semblent indiquer que la surface est constituée d'argiles et que l'eau a donc joué un rôle important dans le passé géologique. De l'eau semble encore s'échapper de la surface de Cérès et une calotte de glace pourrait subsister au niveau des pôles[7]. Cérès est plus éloignée que Vesta du Soleil ce qui pourrait expliquer que le processus de différenciation ne soit pas enclenché ; une autre explication serait que Cérès se soit formée plus tardivement et que la majorité des éléments radioactifs présents à l'origine se soient déjà désintégrés. La gravité sur Cérès, dont la densité est le tiers de celui de la Terre, est identique à celle de Vesta, bien que la protoplanète ait un rayon double, car sa densité est deux fois plus faible. Aucune météorite en provenance de Cérès n'a jusqu'à présent pu être identifiée : il se pourrait que la protoplanète n'ait pas subi de collision analogue à celles subies par Vesta. Une autre explication serait que le spectre électromagnétique de la surface ne reflète pas la composition des roches qui n'auraient pu être identifiées parmi les météorites qui parviennent jusqu'à la Terre[5].
Les deux astéroïdes que doit explorer la sonde Dawn ont donc des caractéristiques qui se partagent entre celles des planètes internes qui ont subi un processus de fusion interne et de différenciation et celle des planètes externes formées en grande partie de glace[7].
Objectifs scientifiques de la mission Dawn

Dawn doit rejoindre la ceintures d'astéroïdes et se placer successivement en orbite autour de Vesta et de Cérès. La sonde spatiale doit déterminer la structure interne des deux astéroïdes, leur densité, leur forme, leur taille, leur composition et leur masse. Dawn doit fournir des informations sur la topographie de la surface et faire un inventaire des cratères. Toutes ces mesures doivent permettre de reconstituer l'histoire de la formation de Vesta et Cérès et le rôle de l'eau dans l'évolution des astéroïdes. Elles doivent contribuer à comprendre les conditions et les processus à l'œuvre au tout début de la formation du système solaire ainsi que le rôle de l'eau et de la taille dans l'évolution des planètes[8]
La sonde spatiale doit effectuer les mesures suivantes[7] :
- mesurer la densité de Cérès et de Vesta avec une incertitude < 1%,
- mesure l'inclinaison de l'axe de rotation avec une erreur < 0,5°,
- mesurer le champ de gravité des deux astéroïdes,
- photographier plus de 80% de la surface avec une définition au moins égale à 100 mètres par pixel pour Vesta et 200 m par pixel pour Cérès,
- réaliser une carte topographique de plus de 80% de la surface des deux astéroïdes avec la même définition que les images et une précision verticale de 10 mètres et de 20 mètres pour Cérès,
- mesurer l'abondance et la distribution des principales formations rocheuses
- mesurer l'abondance et la distribution de l'hydrogène, du potassium, du thorium et de l'uranium à la surface des deux astéroïdes,
- effectuer plus de 10 000 mesures spectrales de Vesta dans les longueurs d'ondes 0,25-5 μm avec une résolution < 200 mètres par pixels pour la moitié des spectres,
- effectuer plus de 8 000 mesures spectrales de Cérès dans les longueurs d'ondes 0,25-5 μm avec une résolution < 400 mètres par pixels pour la moitié des spectres.
Les différentes phases de la mission
Pour atteindre la ceinture d'astéroïdes, la sonde ne peut pas emprunter une route directe en suivant une orbite de transfert car la poussée de ses moteurs ioniques est trop faible pour effectuer les deux manœuvres nécessaires pour se placer sur cette orbite puis pour la quitter : alors qu'un moteur-fusée conventionnel (chimique) permet en 20 minutes d'accélérer ou décélérer de 1 km/s en consommant 300 kg de carburant, le moteur ionique pour réaliser la même performance mettra 100 jours mais ne consommera que 25 kg de carburant[9]. Pour parvenir à la ceinture d'astéroïdes, la sonde décrit donc une trajectoire en spirale et atteint Vesta après avoir bouclé un peu plus de deux tours autour du Soleil. En faisant fonctionner durant 70% du temps ses propulseurs, la sonde s'échappe progressivement du puits de gravité du Soleil. Vesta plus proche du Soleil est le premier astéroïde atteint. En profitant d'une conjonction qui ne se reproduit que tous les 17 ans, la sonde peut quitter Vesta pour atteindre Cérès. Grâce à l'excellent rendement de son moteur, la sonde sera parvenue à accélérer de 10 km/seconde entre la Terre et sa destination en consommant moins de 400 kg de xénon soit 30% de sa masse établissant un record sans précédent parmi les sondes spatiales[9]. Au cours de son périple d'une durée de huit ans, Dawn va parcourir au total une distance de 4,9 milliards de kilomètres.
Transit vers la ceinture d'astéroïdes

Le lanceur Delta II a placé Dawn sur une orbite elliptique de 1 UA sur 1,62 UA avec une légère inclinaison par rapport au plan de l'écliptique (0,6°). La marge disponible permet à la sonde d'atteindre la cible si la durée de la défaillance de sa propulsion est inférieure ou égale à 28 jours. La trajectoire est calculée pour permettre une interruption de la propulsion de 8 heures par semaine dédiée aux échanges de données avec les stations terrestres et à d'autres activités. Du fait des spécificités de la propulsion ionique, la fenêtre de lancement était très large puisqu'elle s'étendait de mai 2006 à septembre 2007 sans changement important dans les dates d'arrivée[10]..
Assistance gravitationnelle de Mars
Après avoir parcouru plus de 900 millions de km, Dawn qui a pratiquement bouclé une orbite autour du Soleil utilise l'assistance gravitationnelle de la planète Mars pour améliorer sa trajectoire. En survolant Mars à une altitude de 500 km, la sonde rehausse l'apogée de son orbite de 1,69 UA à 1,87 UA et modifie l'angle du plan de son orbite de 5,2° la rapprochant de l'orbite de Vesta. Pour effectuer la même manœuvre avec son seul moteur, la sonde aurait dû modifier sa vitesse de 2,6 km/s[11]
De Mars à Vesta
Lorsque la sonde franchit la limite des 2 Unités Astronomiques par rapport au Soleil, l'intensité lumineuse n'est plus suffisante pour permettre de faire fonctionner à pleine puissance le moteur ionique. En mai 2011, alors que la sonde se situe encore à 1,2 million de km de l'astéroïde, Dawn débute une navigation optique c'est à dire en utilisant des photos prises à l'aide de la caméra scientifique FC qui sont ensuite interprétées par l'équipe projet sur Terre pour corriger la trajectoire. Ces images permettent également d'identifier les points remarquables à la surface de l'astéroïde et étudier son environnement pour localiser d'éventuelles petites lunes en orbite autour Vesta. A environ 15 000 km de Vesta la sonde entre dans son champ de gravité. Du fait de la faiblesse de la poussée du moteur ionique, l'insertion en orbite autour de Vesta n'est pas obtenue par une décélération brutale aux abords de l'astéroïde mais par un alignement progressif de l'orbite de la sonde sur celle de Vesta entamé longtemps auparavant. Alors que la sonde se trouve à 16 000 km de l'astéroïde la vitesse relative de la sonde par rapport à celle-ci n'est plus que de 50 mètres par seconde[N 1]. Deux semaines plus tard la sonde entame une première orbite de 10 jours autour de Vesta qui est réduite progressivement à 3 jours et permet à la sonde d'entamer la phase d'observation scientifique rapprochée[12],[13].
Exploration de Vesta

Dawn se place en orbite autour de Vesta le 16 juillet 2011 avant d'en repartir en mai 2012 et de se diriger vers Cérès[14]. La sonde se place d'abord sur une orbite de reconnaissance de 2 700 km (survey orbit) qui est suffisamment haute pour que les instruments de la sonde aient une vue d'ensemble de l'astéroïde. Dawn circule sur une orbite polaire d'une périodicité de 2,5 à 3 jours. Vesta effectue un tour complet sur elle-même en 5 heures et 20 minutes ce qui facilite les prises de vue de la partie éclairée de la planète et permet d'en dresser une carte en couleurs en lumière visible, ultraviolet et infrarouge avec une définition de 250 mètres par pixel. Il est prévu que Dawn boucle 6 orbites (17 jours) à cette altitude. La sonde transfère les données collectées vers la Terre lorsque elle se situe sur la partie de l'orbite qui fait face à la partie non éclairée de Vesta.
La sonde doit ensuite se placer sur une orbite polaire haute de 660 km dite HAMO (High Altitude Mapping Orbit) en décrivant une spirale. Compte tenu de la faible poussée du moteur ionique ce changement d'orbite va prendre un mois. Dawn parcourt 2 orbites par jour à cette altitude. Il est prévu de consacrer dix orbites aux prises d'images avec FC et autres relevés scientifiques (VIR). Les prises d'images seront prises à la verticale ainsi que de biais pour permettre de reconstituer des vues en relief [15],[16].
La sonde doit enfin descendre sur une orbite polaire basse de 180 km dite LAMO (Low Altitude Mapping Orbit) en décrivant des spirales durant 8 semaines. Dawn doit passer deux mois sur cette orbite en effectuant un tour complet de Vesta toutes les 4 heures. Des images détaillées devraient être prises avec FC et VIR mais cette phase est surtout dédiée aux relevés du spectromètre gamma et à neutron GRaND. Les mesures effectuées avec GRaND nécessitent de longs temps d'exposition durant lesquels la sonde doit maintenir l'instrument immobile par rapport à la cible et neutraliser le défilement généré par le mouvement orbital. Cette phase est également utilisée pour mesurer le champ de gravité depuis la Terre en évaluant les modifications de l'orbite suivie par la sonde grâce au décalage Doppler des émissions radio émises par celle-ci[15],[16].
Après avoir repris de l'altitude en spiralant autour de Vesta, la sonde échappe à l'attraction de Vesta en juillet 2012 et après avoir parcouru une demi-orbite autour du Soleil tout en faisant fonctionner son moteur ionique de façon quasi continue rejoint Cérès en février 2015.
Exploration de Cérès
L'étude de Cérès s'échelonne entre février et juillet 2015. Comme pour Vesta, l'exploration de Cérès comprend trois phases avec un séjour à 5 900 km, 1 300 km, puis à 700 km [17].
Les caractéristiques techniques de la sonde spatiale Dawn
L'architecture de la sonde spatiale dérive en grande partie d'engins spatiaux développés auparavant. La plateforme est développée à partir celle de la série STAR-2 utilisée par les satellites de télécommunications géostationnaires d'Orbital Sciences Corporation tandis que l'avionique est largement dérivée de celle de la série LEOStar-2 utilisée par le même constructeur pour ses satellites d'observation terrestre[18]. La propulsion principale, qui est confiée à des moteurs ioniques au xénon, reprend l'engin utilisé avec succès par la sonde Deep Space 1.
La structure centrale de Dawn est un cylindre en matériau composite à base de fibre de carbone dans laquelle sont logés les réservoirs de xénon (capacité de 450 kg) et d'hydrazine (45 kg) utilisés pour propulser et orienter la sonde. Le cylindre central est enfermé dans un parallélépipède de 1,64 x 1,27 x 1,77 6 m. constitué de panneaux en aluminium sur lesquels sont montés la plupart des autres composants de la sonde. Dawn a une masse à sec de 725 kg et d'environ 1237 kg avec les ergols[18],[8],[19].

| Abréviation | Composant | Masse (kg) |
|---|---|---|
| Structure | - | 108 |
| IPS | Moteurs ioniques | 129 |
| EPS | Panneaux solaires | 204 |
| ACS | Contrôle orientation | 37 |
| RCS | Propulseurs d'attitude | 14 |
| TCS | Contrôle thermique | 44 |
| CDHS | Calculateurs, télémesure/télécommande |
21 |
| Système télécommunications | 25 | |
| Câblage électrique | 82 | |
| Ballast | 13 | |
| Masse sèche | 680 | |
| FC | Caméra | 11 |
| GRaND | Spectromètre gamma et neutron | 10 |
| VIR | Spectro-imageur | 24 |
| Masse charge utile | 45 | |
| Ergol | Hydrazine | 45,6 |
| Ergol | Xénon | 425 |
| Masse totale | 1 237[N 2] | |
Les moteurs ioniques

La sonde utilise une version améliorée du moteur ionique au xénon NSTAR (NASA Solar electric propulsion Technology Application Readiness) qui a propulsé la sonde Deep Space 1 lancée en 1998. C'était à l'époque la première fois que ce type de moteur était utilisé comme propulsion principale par une sonde interplanétaire. Un moteur ionique fonctionne en éjectant à grande vitesse des ions accélérés par le champ électrostatique créé par une grille chargée électriquement. En application de la loi de la conservation de la quantité de mouvement la sonde est accélérée en sens inverse de manière proportionnelle à la vitesse du xénon injecté et inversement proportionnelle à sa masse. L'énergie utilisée pour éjecter le xénon est fournie par l'électricité produite par les panneaux solaires. Le rendement de ce type de moteur est bien supérieur à celui d'un moteur-fusée : la vitesse d'éjection du xénon est 10 fois supérieure à celle des gaz produits par les propulseurs chimiques utilisés habituellement sur les sondes. Mais la poussée est très faible : sur NSTAR elle peut être comprise entre 92 milliNewton (sur Terre une poussée de 9,2 grammes soit l'équivalent du poids d'une feuille de papier) pour une consommation électrique de 2,6 kW et 19 mN pour une consommation de 0,5 kw[21],[22],[23].
À pleine puissance, le NSTAR consomme 3,25 milligrammes de xénon par seconde soit un peu plus de 300 grammes par 24 heures. L'accélération obtenue au bout de 24 heures est d'environ 25 km/h. La propulsion est modulable : un ordinateur dédié et qui dispose d'une doublure en cas de défaillance, permet de faire varier à la demande à la fois la puissance électrique délivrée et l'alimentation en xénon du moteur. La poussée peut être ainsi être modulée par pas de 1/124. Un transformateur porte la tension du courant reçu des panneaux électriques de 100 volts à 1000 volts. Pour fournir l'accélération nécessaire à la mission, le système de propulsion ionique (IPS Ion Propulsion System) doit, fonctionner pratiquement en permanence car il lui faut pallier la faiblesse de la poussée. La sonde n'utilise qu'un seul moteur à un moment donné mais dispose de 3 moteurs pour faire face à l'usure et aux risques de défaillance. Les trois moteurs sont regroupés sur la face arrière de la sonde à l'opposé de la face portant les instruments scientifiques. L'orientation de chaque moteur peut être modifiée d'environ 3 degrés pour modifier l'orientation de la sonde et également compenser la modification du centre de masse au cours de la mission due à l'épuisement progressif du xénon stocké[21],[22][23]
Les panneaux solaires


Les moteurs ioniques ont besoin de beaucoup d'énergie électrique et au niveau de la ceinture d'astéroïdes l'intensité lumineuse est considérablement réduite. Les panneaux solaires sont donc de grande dimension : la sonde comporte deux grandes ailes de 18 m² (2,3 x 8,3 m.) comprenant chacun 5 panneaux solaires couverts de cellules solaires triple jonction InGaP/InGaAs/Ge qui fournissent 10,3 kW au niveau de l'orbite terrestre mais seulement 1,3 kW au niveau de la ceinture d'astéroïdes à la fin de la mission[N 3]. Il s'agit des panneaux solaires les plus puissants ayant jusque là équipé une sonde spatiale[24][N 4]. Les panneaux solaires de Dawn sont repliés en accordéon durant le lancement et déployés une fois la sonde en orbite ; celle-ci a alors une envergure totale de 19,7 mètres. Les panneaux solaires sont orientables autour de leur axe longitudinal. L'énergie électrique est convertie par l'IPS (Electrical Power System) en courant à 80-140 Volts à destination des moteurs ioniques et 22-35 Volts pour les autres équipements. L'énergie électrique est stockée dans une batterie Ni-H2 de 35 Ampères-heures[25],[8].
Les instruments scientifiques
Dawn embarque trois instruments scientifiques : une caméra fonctionnant en lumière visible et proche infrarouge (FC), un spectromètre gamma et à neutrons (GRaND) et un spectromètre en lumière visible et infrarouge (VIR). Par ailleurs le système de télécommunications est mis à contribution pour mesurer le champ de gravité par effet Doppler depuis les stations terrestres[26].
Le spectromètre gamma et à neutron GRaND
Le Laboratoire national de Los Alamos, au Nouveau-Mexique fournit le spectromètre gamma et à neutron (GRaND Gamma Ray and Neutron Detector). La combinaison des spectrographes gamma et neutron fournit des spectres permettant de déterminer l'abondance des principaux éléments présents dans les roches (oxygène, magnésium, aluminium, silicium, calcium, fer, titane). Le spectromètre gamma permet de détecter les éléments radioactifs comme les isotopes d'uranium, thorium et potassium. La présence de vapeur d'eau est également déduit des mesures effectuées par ces instruments. GRaND dérive d'instruments embarqués sur les sondes spatiales Lunar Prospector et 2001 Mars Odyssey. Pour effectuer ses mesures GRaND analyse les neutrons et le rayonnement gamma produit par les roches de la couche superficielle (moins de 1 mètre) sous l'impact du rayonnement cosmique à très haute énergie[16],[26].
La caméra FC
La caméra FC (Framing Camera), qui fonctionne en lumière visible et proche infrarouge, est fournie par l'Institut Max-Planck de recherche sur le système solaire de Katlenburg-Lindau (Allemagne) et l'Institut de recherche planétaire rattaché à l'Agence de recherche aéronautique et aérospatiale allemande (DLR) situé à Berlin. Elle est utilisée pour effectuer la topographie et la cartographie des astéroïdes mais également pour les besoins de navigation lorsque la sonde se trouve à proximité de Vesta et Cérès. Elle comprend en fait deux caméras identiques pour permettre de pallier une panne. La caméra FC a une distance focale de 150 mm et une ouverture de f/7,9. Le capteur est un Le CCD à transfert de trame avec une résolution de 1024x1024 pixels (1 mégapixel). La caméra peut utiliser 8 filtres montés sur une roue pour sélectionner une partie du spectre lumineux. La caméra FC dispose de sa propre électronique qui gère les séquences photographiques et effectue les taches de compression et recadre les prises de vue conformément aux instructions. Chacune des deux caméras dispose d'une mémoire de stockage de 8 Go[26].
Le spectro-imageur VIR
Le spectro-imageur visible et infrarouge VIR (Visible et Infrared Spectrometer) est fourni par l'Institut national italien d'astrophysique à Rome, et l'Agence spatiale italienne. VIR dérive de l'instrument embarqué sur les sondes européennes Rosetta et Venus Express. L'instrument est en grande partie une évolution du spectromètre de Cassini. VIR est utilisé pour dresser la carte de la composition minéralogique de la surface des astéroïdes. Deux capteurs sont utilisés pour couvrir les longueurs d'onde comprises entre 0,25 et 5 μm. L'électronique de VIR permet de comprimer les images obtenues et d'effectuer des recadrages. L'instrument dispose d'une mémoire de stockage de 6 Go[26].
-
 Le spectromètre gamma GRaND
Le spectromètre gamma GRaND -
 La caméra FC
La caméra FC


Contrôle d'attitude
Dawn est un engin stabilisé 3 axes. En phase de croisière normale le système de contrôle d'attitude (ACS) utilise des senseurs stellaires pour déterminer l'orientation et la vitesse de la sonde et des gyroscopes pour détecter les changements d'orientation et de vitesse. Des senseurs solaires (CSS Coarse Sun Sensor) sont également utilisés pour effectuer des contrôles plus grossiers. Tous les senseurs sont doublés. Durant la phase de transit la sonde utilise cinq fois par seconde ses senseurs stellaires pour vérifier l'orientation de la sonde et si nécessaire déclenche une correction de celle-ci et éventuellement réoriente les panneaux solaires. Les gyroscopes, qui ont une durée de vie limitée, ne sont pratiquement pas utilisés durant le transit : ils sont mis en marche pour permettre un pointage précis des instruments lorsque la sonde recueille ses données scientifiques. Pour corriger l'orientation de la sonde, l'ACS peut utiliser des roues de réaction au nombre de quatre (une de rechange), faire pivoter le moteur ionique s'il est en marche ou utiliser des petits moteurs-fusée consommant de l'hydrazine (Reaction Control System RCS). Ces derniers sont également utilisés pour désaturer les roues de réaction [N 5]et disposent d'une marge suffisante de carburant (45 kg en tout) pour effectuer une modification rapide d'orbite, si la sonde ne dispose pas de suffisamment de temps pour l'effectuer avec le moteur ionique. Ces propulseurs d'attitude sont regroupés en deux grappes de 6 moteurs d'une poussée unitaire de 0,9 Newton. L'ACS est également chargé de maintenir l'orientation des panneaux solaires, qui peuvent pivoter avec deux degrés de liberté, de manière à ce que ceux-ci soient toujours perpendiculaires à l'incidence des rayons du Soleil[25],[27],[28].
Système de contrôle et de gestion des données

Le système de contrôle et de gestion des données (Command and Data Handling System CDHS), cerveau de la sonde, utilise un calculateur durci contre les radiations RAD6000 cadencé à 33 MHz qui exécute des programmes écrits en langage C et en assembleur. Ceux-ci tournent sous le système d'exploitation VxWorks. Le CDHS dispose d'une mémoire de masse de 8 Go pour le stockage des données scientifiques et des télémesures. Le logiciel de bord qui pilote la sonde comprend environ 400 000 lignes de codes. La sonde dispose d'un ordinateur de secours et de 4 exemplaires du logiciel (2 par ordinateur). Le système surveille en permanence plus de 200 paramètres. Il communique avec les différents composants de la sonde spatiale via un bus Mil-Std-1553B sauf avec l'instrument GRaND qui utilise un bus série RS-422. Pratiquement toutes les cartes électroniques composant le système ont été développées pour des familles de satellites du constructeur Orbital. 80% du code programme a été également écrit dans le cadre de ces projets. La principale évolution logicielle porte sur l'introduction du Virtual Machine Langage, un méta langage utilisé par les sondes Mars Odyssey et Mars Reconnaissance Orbiter ainsi que par le télescope spatial Spitzer ; ce langage permet d'envoyer à la sonde des commandes complexes comprenant des ordres conditionnels[25],[28]..
Systèmes de télécommunications
Le système de télécommunications opère en bande X et permet de recevoir des données avec un débit compris entre 7,8 octets et 2 ko/s et d'émettre avec un débit compris entre 10 octets/s et 124 ko. Le système repose sur deux transporteurs d'une puissance de 100 Watts mis au point par le JPL pour ses sondes interplanétaires. Dawn a une antenne parabolique grand gain fixe (High Gain Antenna HGA) d'un rayon de 1,52 mètre et trois antennes à faible gain (LGA) émettant chacune dans le prolongement de l'un des trois axes de la sonde. Une seule antenne peut être utilisée à un instant donné[29].
Contrôle thermique
Le système de contrôle thermique (Thermal Control System TCS) utilise à la fois des moyens passifs et actifs pour maintenir les composants de la sonde dans une plage de température acceptable. Des louvres (ouvertures) s'ouvrent automatiquement pour évacuer la chaleur excédentaire produite par l'électronique ou l'action du Soleil. Des caloducs dans lesquels circulent de l'ammoniac sont également utilisés dans le même objectif. Au fur et à mesure que la sonde s'éloigne du Soleil, il faut également combattre le froid. Près de 150 résistances sont installées près des équipements sensibles. Lorsque la sonde se trouve dans la ceinture d'astéroïdes, le système de contrôle thermique consomme 200 Watts pour maintenir une température suffisante. Chaque seconde une centaine de capteurs fournissent des informations sur la température des différents équipements que le logiciel de bord utilise pour déclencher les différents mécanismes de régulation thermique[25],[28].
Historique et déroulement de la mission
Sélection de la mission
La mission Dawn est le 9e projet [30] du programme Discovery de la NASA qui rassemble des missions d'exploration interplanétaires répondant à des interrogations scientifiques ciblées et qui nécessitent des ressources suffisamment modestes pour permettre des lancements fréquents . Pour répondre à cet objectif, le cout d'une mission Discovery doit être inférieur à 425 millions de dollars (299 millions de dollars en 2001), le délai de développement ne doit pas excéder 36 mois, le nombre d'instruments scientifiques est réduit et le développement est confié à une seule équipe[31]. La NASA sélectionne la mission Dawn en décembre 2001 en même temps que le télescope spatial Kepler parmi 26 missions scientifiques proposées[32]. La mission est baptisée Dawn (c'est à dire aube) car elle doit apporter des réponses sur la naissance (=l'aube) du système solaire[33].
La gestion du projet Dawn est confiée au centre spatial de la NASA JPL qui est dédié au développement des sondes interplanétaires. Celui-ci assure la conduite du projet et fournit également le système de propulsion ionique, une partie du système électrique et du système de télécommunications. La société Orbital Sciences est choisie pour construire la sonde spatiale, intégrer les composants fournis par les autres participants, réaliser les tests et assurer le lancement. La sonde emporte 3 instruments scientifiques dont le spectromètre VIR fourni par l'Italie et la caméra FC fournie par l'Allemagne[6].
De la conception à la réalisation (2002-2006)

Le projet démarre officiellement en septembre 2002 et les participants (industriel, équipes européenne, JPL) entrent dans une phase pleinement active en janvier 2002[34]. Au cours de la phase préparatoire de la première revue (Preliminary Design Review PDR) il est décidé d'ajouter un cinquième panneau solaire sur chaque aile de la sonde pour disposer d'une marge de puissance plus importante lorsque Dawn sera près de Cérès située à 2,9 UA du Soleil. Pour accroitre la marge financière du projet, l'équipe décide également de remplacer le lanceur Delta II lourd par une version standard[35].
Entre décembre 2003 et janvier 2004 le télescope Hubble est utilisé pour une campagne d'observation de Cérès. Les 267 images obtenues à l'aide de la caméra à haute résolution permettent de préciser certaines caractéristiques de la planète naine : son corps est pratiquement une sphère parfaite mais son diamètre à l'équateur est plus important qu'au niveau des pôles. Les simulations informatiques indiquent que Cérès comporte un noyau dense et une croute superficielle composée de roches légères. Les astronomes considèrent que de la glace pourrait se trouver enfouie sous la surface car la densité de Cérès est inférieure à celle de la croute terrestre et parce que l'analyse spectrométrique de la surface indique des minéraux riches en eau. Ils estiment que Cérès est composée à 25% d'eau[36].
En février 2004, le projet après avoir franchi la revue préliminaire entre en phase d'implémentation. Pour répondre à une consigne générale de réduction des risques de dépassement budgétaire, d'accroissement de la masse et de la consommation électrique et de retard sur le planning plusieurs caractéristiques de la mission et de la sonde sont modifiées. La marge sur la consommation électrique est portée à 15% en augmentant la superficie des panneaux solaires pour pouvoir faire face à des besoins inattendus. Une marge de 25% sur le cout est introduite. Pour atteindre cet objectif la durée du séjour en orbite autour des astéroïdes est réduit de 11 mois à 7 mois pour Vesta et à 5 mois pour Cérès. Deux des cinq instruments scientifiques sont supprimés : l'altimètre laser qui avait été abandonné avant même la revue préliminaire et le magnétomètre bien que sa présence aurait pu permettre d'analyser le champ magnétique résiduel de Vesta et détecter la présence d'eau liquide sous la croute superficielle de Cérès[37].
En juin la revue critique de conception (Critical Design Review) est franchie sans encombre et la sonde entre en phase de fabrication[38]. En janvier l'assemblage de la sonde débute chez le constructeur Orbital Sciences. Les tests environnementaux et thermiques des panneaux solaires sont réalisés et les bancs d'essai des systèmes de commande sont mis au point. Les instruments scientifiques sont livrés entre avril et juillet 2005[39].
Menaces d'annulation

Le projet Dawn avait déjà été annulé une première fois en décembre 2003[40] avant d'être réactivé en février 2004. Mais en septembre 2005 les responsables du projet annoncent aux dirigeants de la NASA que le budget alloué ne sera pas suffisant et demandent une enveloppe supplémentaire de 40 millions $. Le lancement de la sonde est repoussé de 2006 à 2007 pour étaler la dépense et prendre compte des retards du projet. L'état major de la NASA réagit en demandant le gel du projet en octobre 2005 et lançant un audit de celui-ci. Les experts indépendants rendent leur rapport en janvier 2006 et mettent en évidence une mauvaise gestion du projet mais concluent que celui-ci peut être mené à son terme avec un an de retard et à condition d'injecter 73 millions $ portant le cout total à 446 millions $. Deux problèmes techniques sont mis en évidence : deux exemplaires du réservoir contenant le xénon et réalisés avec des feuilles de titane ultra minces enrobées de composite carbone ont cédé de manière spectaculaire durant les essais de pression et un relais de l'électronique de puissance associé au moteur ionique a également été victime d'une défaillance au banc d'essais. Le 3 mars le responsable du programme des missions interplanétaires au quartier général de la NASA appelle le responsable scientifique de la mission (Principal Investigator PI) pour lui annoncer l' annulation de la mission. La décision soulève une levée de boucliers de la part des scientifiques engagés dans le projet qui obtiennent que la décision soit réexaminée. Les ingénieurs sur le projet proposent de réduire la pression dans le réservoir de xénon en limitant la quantité embarquée à 425 kg au lieu des 450 kg en entamant la marge disponible et de mener une campagne dédiée pour valider le fonctionnement de l'électronique associée au moteur ionique [41],[42].Orbital Sciences, le constructeur de la sonde, de son côté fait appel de la décision et offre de construire Dawn à prix coutant pour gagner en expérience sur ce type de marché[43]. Finalement la NASA annonce le 27 mars 2006 que la mission est réactivée[44],[45].
Lancement (septembre 2007)

Le lancement est planifié pour le 7 juillet 2007. Durant la phase d'assemblage de la sonde sur son lanceur fin juin, la partie arrière d'un panneau solaire est entamée accidentellement par un outil mais une réparation est rapidement effectuée[46]. A la suite de retards liés à des conditions météorologiques défavorables le lancement de la sonde spatiale est repoussé à septembre. En effet la sonde martienne Phoenix a désormais la priorité car elle doit être impérativement lancée au cours de l'été ; or son pas de tir est situé à moins de 200 mètres de celui de Dawn ce qui interdit temporairement l'utilisation du pas de tir de Dawn. Pour réduire les conséquences financières d'une explosion du lanceur de Phoenix, la sonde Dawn est mise à l'abri[47].
La fusée porteuse Delta II de type 7925H-9.5 est finalement lancée le 27 septembre 2007. L'extinction du premier étage a lieu 4 minutes et 23 secondes après la mise à feu alors qu'elle se trouve à 130 km d'altitude et que sa vitesse est de 6,3 km/secondes. La coiffe est éjectée à l'altitude de 135 km. Le second étage est arrêté une première fois 8 minutes 58 secondes après le lancement après avoir placé la sonde sur une orbite basse terrestre. Quelques minutes plus tard le deuxième étage est remis à feu durant plus de deux minutes. Lorsqu'il s'arrête quatre petites fusées sont mis à feu pour imprimer une rotation de 50 tours par minute au lanceur et à sa charge utile : en effet le troisième étage ne dispose pas de système de correction d'orientation et cette dernière est maintenue par effet gyroscopique. Le troisième étage est alors mis à feu et permet à la sonde d'atteindre la vitesse de 11,43 km/s dépassant la vitesse de libération et lui permettant ainsi d'échapper à l'attraction terrestre. La vitesse de rotation imprimé par le second étage est annulé en deux temps. Un yoyo constitué de deux câbles de 12,15 mètres au bout duquel se trouve une masse de 1,44 kg formée par une combinaison de tungstène et d'aluminium est dévidé et largué ; par conservation de la quantité de mouvement il imprime une vitesse de rotation inversée réduite à 3 tours par minute ; le xénon stocké en phase supercritique qui continue à tourner à l'intérieur du réservoir dans le sens inverse finit par annuler la vitesse résiduelle au bout d'un peu plus de 8 minutes. Si nécessaire le système de contrôle d'attitude utilise les moteurs à hydrazine pour stabiliser complètement la sonde et l'orienter dans la configuration prévue. Les panneaux solaires sont déployés, après avoir été débloqués, à l'aide de ressorts en une quinzaine de minutes[46].
Transit vers Vesta (2007-2011)

Le transit vers Vesta commence par une phase de 2 mois durant laquelle le fonctionnement de la propulsion ionique, des systèmes de contrôle d'attitude et des télécommunications est vérifié et les instruments scientifiques sont calibrés. Des phases propulsives continues sont effectuées à différents niveaux de puissance. L'ensemble des tests s'achève mi-décembre 2007 sans avoir mis en évidence de problème de fonctionnement majeur. Une nouvelle version du logiciel, corrigeant les anomalies détectées, est téléchargée sur l'ordinateur de bord à la fin de la phase de test[48]. Durant son transit vers la ceinture d'astéroïdes, Dawn utilise à tour de rôle ses moteurs ioniques pour répartir l'usure. Le moteur n°3 est ainsi utilisé d'octobre 2007 à juin 2008, le n°1 prend le relais jusqu'en janvier 2010, le n°2 l'a ensuite relayé en accélérant la sonde de 2,2 km/s et en consommant 79 kg de xénon jusqu'en décembre 2010; depuis cette date Dawn est propulsé par le n°3[16].
Le 17 février 2009 la sonde effectue un survol planifié de Mars en passant à 542 km de la surface de la planète. L'assistance gravitationnelle fournie par Mars permet à la sonde d'accroitre sa vitesse et de rapprocher son orbite de celle de Vesta. Deux bugs successifs dans le logiciel déclenchés par l'aveuglement prévu du senseur stellaire ébloui par la luminosité de Mars font basculer la sonde en mode sans échec sans conséquences pour la suite de la mission[16]. Mi-2009, après de longues analyses du comportement de la sonde, l'équipe projet conclut que le système de propulsion se comporte mieux que prévu, en particulier que les panneaux solaires sont plus efficaces, faisant gagner 6 semaines sur la date d'arrivée à Vesta et 6 semaines sur le transit entre Vesta et Cérès. Combiné à d'autres facteurs, le gain de puissance permet d'allonger le séjour en orbite de Vesta à 12 mois au lieu des 9 prévus initialement[49]. Le 13 novembre 2009, la sonde atteint la ceinture d'astéroïdes. Bien que celle-ci contienne un grand nombre d'astéroïdes dont plus de un million ont un diamètre supérieur à 1 km, la probabilité que la sonde heurte un de ceux-ci est très faible car ces objets sont très espacés. De plus le vecteur vitesse de la sonde est proche de celui des astéroïdes ce qui réduit encore le risque de collision[50]. Le 5 juin 2010 Dawn établit un nouveau record parmi les sondes interplanétaires en accumulant une accélération de plus de 4,4 km par seconde grâce à son moteur ionique. Le détenteur du précédent record était la sonde Deep Space 1 également équipée d'un moteur de ce type[47].
| Date | Périgée | Apogée | Inclinaison / écliptique | Accélération (km/s) |
Xénon consommé (kg) |
Jours avec propulsion | Remarque |
|---|---|---|---|---|---|---|---|
| 27/9/2007 | 1 U-A | 1,62 U-A | 0,6° | 0 | 0 | 0 | Orbite au lancement |
| 27/9/2008 | 1,21 U-A | 1,68 U-A | 1,4° | 1,68 | 67 | 253 | |
| 27/9/2009 | 1,42 U-A | 1,87 U-A | 6,2° | 2,62 | 103 | 389 | |
| 27/9/2010 | 1,89 U-A | 2,13 U-A | 6,8° | 5,01 | 189 | 715 | |
| 21 juillet 2011 | 2,15 U-A | 2,57 U-A | 7,1° | Orbite de Vesta | |||
| février 2015 | 2,54 U-A | 2,99 U-A | 10,6° | Orbite de Cérès | |||
| U-A = Unité Astronomique = Distance de la Terre au Soleil | |||||||
En mai 2010, du fait de la distance croissante entre la sonde et le Soleil, l'énergie produite par les panneaux solaires n'est plus suffisante pour alimenter les systèmes de Dawn tout en utilisant 100% de la poussée du moteur ionique. Pour continuer à alimenter le moteur à sa poussée maximale, les liaisons radio jusque là continues sont remplacées par des vacations planifiées deux fois par semaine. A partir du 23 aout, un peu plus d'un mois après la date prévue, alors que la sonde se trouve à 2,02 UA du Soleil, la diminution de l'ensoleillement impose à la sonde de réduire la poussée demandée au moteur ionique. Juste avant cet événement, grâce à l'allégement provoqué par la consommation de son carburant, la sonde a atteint son pic d'accélération avec 7,6 mètres par seconde gagné sur une journée[52],[16].
Arrivée et étude de Vesta (juillet 2011-juillet 2012)
Début mai, Dawn, qui ne se trouve plus qu'à 1,21 millions de km de Vesta, entame la phase d'approche durant laquelle une navigation beaucoup plus précise est nécessaire. A cet effet la caméra FC commence à prendre régulièrement des photos de Vesta sur fond d'étoiles ce qui permet aux membres de la mission de situer l'astéroïde et d'optimiser la trajectoire de la sonde spatiale[53]. Du fait de son mode de propulsion, l'approche se fait à des vitesses relatives faibles : la sonde ne progresse plus que de 0,37 km/s par rapport à Vesta et cette vitesse diminue en permanence tandis que son orbite est presque alignée sur celle de l'astéroïde[54]. Le 27 juin l'un des deux calculateurs qui contrôle les vannes d'alimentation en carburant des moteurs 1 et 3 ne parvient plus à ouvrir celles-ci. L'explication la plus probable est qu'un de ses circuits électroniques a été touché par un rayon cosmique. En attendant de déterminer s'il peut être remis en marche, le deuxième calculateur qui permet de contrôler l'alimentation des moteurs 2 et 3 est activé et la propulsion est réactivée. Le 15 juillet 2011 après avoir parcouru 2,8 milliards de km depuis son lancement et alors que sa vitesse relative par rapport à Vesta est tombé à 111 km/h la sonde entre dans le champ d'influence gravitationnel de l'astéroïde à et entame les manœuvres pour se placer sur sa première orbite de travail autour de Vesta[55],[56].
-
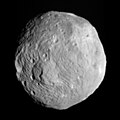 Une des premières images de Vesta obtenue le 7 juillet alors que la sonde se trouve à 41 000 km de l'astéroïde.
Une des premières images de Vesta obtenue le 7 juillet alors que la sonde se trouve à 41 000 km de l'astéroïde. -
 Photo prise le 17 juillet à 15000 km. 1 pixel = 1,5 km.
Photo prise le 17 juillet à 15000 km. 1 pixel = 1,5 km. -
Vesta comparée aux 8 astéroïdes survolés jusqu'à présent par des sondes spatiales


{kind=link}
Notes et références
Notes
- Avec une sonde interplanétaire doté de propulseurs chimiques classiques, la sonde décélère généralement de 0,6 à 1,5 km/s pour pouvoir s'insérer en orbite.
- Des chiffres contradictoires sont fournis sur la masse - entre 1 220 et 1 280 kg - y compris sur le site d'Orbital, constructeur de Dawn.
- Lorsque la sonde se sera éloignée de plus de deux unités astronomiques du Soleil, les panneaux solaires ne permettront plus au moteur ionique de fournir sa pleine puissance du fait de la réduction de l'ensoleillement, mais également du fait de l'accroissement de la consommation des radiateurs chargés de maintenir les équipements dans une fourchette de température acceptable.
- La sonde Rosetta dispose de panneaux de taille nettement plus importante (53 m² pour une envergure de 32 mètres), mais la technologie utilisée ne permet de fournir que 7 kW au niveau de l'orbite terrestre.
- L'orientation de la sonde est perturbée en particulier par la pression de radiation exercée par le Soleil qui exerce une force de direction constante sur de grandes périodes de temps. Les roues à réaction contrebalancent cette force en augmentant leur vitesse de rotation (la sonde pivote dans le sens inverse en application de la conservation du moment cinétique total de la sonde) mais au bout d'un certain laps de temps les roues à réaction ne peuvent plus accroitre leur vitesse. Il faut annuler la rotation des roues à réaction ce qui nécessite d'appliquer une autre force pour ne pas mettre en rotation la sonde toujours en application de la conservation du moment cinétique total. Cette opération de désaturation est appliquée 2 fois par semaine en phase de croisière.
Références
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 1 The Golden Age 1957-1982, Springer Praxis, (ISBN 978-0-387-49326-8), lii-liii
- (en)(en) R. Edgar et P. Artymowicz, « Pumping of a Planetesimal Disc by a Rapidly Migrating Planet », Monthly Notices of the Royal Astronomical Society, vol. 354, , p. 769–772 (DOI 10.1111/j.1365-2966.2004.08238.x, lire en ligne [PDF])
- (en)David O’Brien, Alessandro Morbidelli et William F. Bottke, « The primordial excitation and clearing of the asteroid belt—Revisited », Icarus, vol. 191, , p. 434–452 (DOI 10.1016/j.icarus.2007.05.005, lire en ligne [PDF])
- (en) FAQ NASA mission Dawn, question M2
- (en)« Science : WHY CERES AND VESTA », UCLA : site sur Dawn,
- M.D. Rayman et all op. cit. p. 2
- M.D. Rayman et all op. cit. p. 3
- (en)« Dawn », NASA catalogue NSSDC (consulté le )
- (en)Marc D. Rayman, « Dawn : FAQ », NASA JPL (consulté le )
- M.D. Rayman et all op. cit. p. 7-8
- (en)Marc D. Rayman, « Dawn journal 27 january 2009 », NASA JPL,
- M.D. Rayman et all op. cit. p. 9
- (en)(en) « Dawn Journal : April 28, 2010 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)« Dawn », The Planetary Society (consulté le )
- (en)(en) « Dawn Journal : December 30, 2010 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn Journal : December 30, 2010 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) Erreur de référence : Balise<ref>incorrecte : le nom « j123010 » est défini plusieurs fois avec des contenus différents. - M. Rayman, « Dawn: mission description », UCLA — IGPP Space Physics Center, (consulté le Mois invalide (nocembre))
- M.D. Rayman et all op. cit. p. 4
- (en)« Dawn », Orbital Science Corporation (consulté le )
- M.D. Rayman et all op. cit. p. 7
- M.D. Rayman et all op. cit. p. 4-6
- (en)(en) « Dawn Journal : December 28, 2006 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn Journal : October 7, 2007 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)NASA JPL Dawn Faq : M8 "Dawn carries the most powerful solar arrays ever used on an interplanetary mission." Is that really true?"
- M.D. Rayman et all op. cit. p. 6
- M.D. Rayman et all op. cit. p. 3-4
- (en)(en) « Dawn Journal : May 27, 2008 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn Journal : July 28, 2009 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - M.D. Rayman et all op. cit. p. 6-7
- M.D. Rayman et all op. cit. p. 1
- (en)« DISCOVERY PROGRAM: DESCRIPTION », NASA, (consulté le )
- (en)« JPL Asteroid Mission Gets Thumbs Up from NASA », NASA JPL,
- (en)« Dawn : Frequently asked questions: », NASA JPL (consulté le )
- (en)(en) « Dawn's Early light : Planning A Journey To The Beginning of the Solar System », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn's Early light : Dawn Status », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Largest Asteroid May Be 'Mini Planet' with Water Ice », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn's Early light : Dawn is Confirmed to Proceed to Launch », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn's Early light : Dawn Successfully Passes Critical Design Review », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn's Early light :Dawn Mission Status », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) Nancy Ambrosiano, « NASA's Dawn mission is a go », Los Alamos National Laboratory, (lire en ligne)
- M.D. Rayman et all op. cit. p. 8
- (en)[PDF]Ben Iannotta, « A new day for Dawn », AIAA,
- (en)(en) « NASA reviewing canceled mission », CNN.com, (lire en ligne)
- (en)Rex Geveden, « Dawn Mission Reclama » [PDF], (consulté le )
- (en)Tariq Malik, « NASA Reinstates Cancelled Asteroid Mission », Space.com, (consulté le )
- (en)(en) « Dawn Journal : June 23 2007 Dear Dawnventurers », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn Journal : July 15 2007 Dear Dawntothegrounds », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn : status », {{Article}} : paramètre «
périodique» manquant, paramètre «date» manquant (lire en ligne) - Marc D. Rayman, « Journal de Dawn :September 27, 2009 », NASA / JPL
- (en)(en) « Dawn Journal : November 27, 2007 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - Marc D. Rayman, « Journal de Dawn :September 27, 2008 », NASA / JPL
- (en)(en) « Dawn Journal : August 30, 2010 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn Reaches Milestone Approaching Asteroid Vesta », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn Journal : 3 mai 2011 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « NASA Spacecraft to Enter Asteroid's Orbit on July 15 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne) - (en)(en) « Dawn Journal : 18 juillet 2011 », {{Article}} : paramètre «
périodique» manquant, (lire en ligne)
Sources
- [PDF] (en) M.D. Rayman, T.C. Fraschetti, C.A.Raymond, C.T. Russell, Dawn : A mission in development for exploration of main belt asteroids Vesta and Ceres, (lire en ligne)Synthèse de la mission publiée dans la revue Acta Astronautica de l'Académie internationale d'astronautique
- [PDF] (en) C. T. Russell, A Coradini, U Christensen, M C. De Sanctis, W C. Feldman, R Jaumann, H U.Keller, A S. Konopliv, T B. McCord, L A. McFadden, H Y. McSween, S Mottola, G Neukum, CM. Pieters, T H. Prettyman, C A. Raymond, D E. Smith, M V. Sykes, B G. Williams, J Wise, et M T. Zuber, Dawn: A journey in space and time, (lire en ligne)Article publié dans la revue Planetary and Space Science (67 pages)
Voir aussi
Articles connexes
- Stardust, lancée en 1999 pour étudier la comète 81P/Wild
- Rosetta lancée en 2004 pour étudier la comète 67P/Tchourioumov-Guerassimenko
Liens externes
- (en) Site officiel du programme Dawn par le JPL NASA
- (en) Journal de la mission par Marc Rayman du JPL NASA
- (en) Présentation pour la presse de la mise en orbite autour de Vesta
Modèle:Palette sondes spatiales astéroïdes Modèle:Palette sondes spatiales martiennes Modèle:Palette programme spatial américain